KEP-4958: CSI Sidecars All in one
KEP-4958: CSI Sidecars All In One
- Release Signoff Checklist
- Summary
- Motivation
- Proposal
- Overview
- User Stories (Optional)
- Notes/Constraints/Caveats (Optional)
- Design Details
- MileStone
- Milestone-modify-entrypoints-of-existing-sidecars-to-integrate-it-seamlessly-with-the-AIO-sidecar
- Milestone-setting-up-a-Kubernetes-CSI-Storage-Repository-with-nested-directory-synchronization
- Milestone-Build-the-project-using-a-modified-copy-of-release-tools
- Milestone-set-up-new-test-infra-jobs-to-test-the-project-through-the-hostpath-CSI-Driver
- Milestone-ready-to-accept-PR-from-community
- Milestone-define-the-path-for-2-CSI-Drivers-to-be-migrated.
- Milestone: Have instructions for CSI Driver authors
- Milestone-three-cloud-vendors-start-using-the-monorepo-component-for-multi-k8s-minor-releases
- Milestone-accept-PR-from-community
- milestone-all-individual-repo-has-been-into-featurefreeze-state
- Milestone-all-individual-repo-has-been-into-deprecated-state
- Milestone-merge-sidecar-informer-caches
- Questions and Answers
- Test Plan
- Graduation Criteria
- Upgrade / Downgrade Strategy
- Version Skew Strategy
- Production Readiness Review Questionnaire
- Implementation History
- Drawbacks
- Alternatives
- Infrastructure Needed (Optional)
Release Signoff Checklist
Items marked with (R) are required prior to targeting to a milestone / release.
- (R) Enhancement issue in release milestone, which links to KEP dir in kubernetes/enhancements (not the initial KEP PR)
- [] (R) KEP approvers have approved the KEP status as
implementable - (R) Design details are appropriately documented
- [] (R) Test plan is in place, giving consideration to SIG Architecture and SIG Testing input (including test refactors)
- e2e Tests for all Beta API Operations (endpoints)
- (R) Ensure GA e2e tests for meet requirements for Conformance Tests
- (R) Minimum Two Week Window for GA e2e tests to prove flake free
- (R) Graduation criteria is in place
- (R) all GA Endpoints must be hit by Conformance Tests
- (R) Production readiness review completed
- (R) Production readiness review approved
- “Implementation History” section is up-to-date for milestone
- User-facing documentation has been created in kubernetes/website , for publication to kubernetes.io
- Supporting documentation—e.g., additional design documents, links to mailing list discussions/SIG meetings, relevant PRs/issues, release notes
Summary
We propose to combine the source code of the CSI Sidecars in a monorepo, Instead of just putting the code repositories together, it is expected that the program entries for all sidecars will be consolidated. therefore we can:
- Improve the CSI Sidecar release process by reducing the number of components released
- Decrease the maintenance tasks the SIG Storage community maintainers do to maintain the Sidecars
- Propagate changes in common libraries used by CSI Sidecars immediately instead of through additional PRs
- Reduce the number of components CSI Driver authors and cluster administrators need to keep up to date in k8s clusters
As a side effects of combining the CSI Sidecars into a single component we also
- Reduce the memory usage/API Server calls done by the CSI Sidecars through the usage of a shared informer.
- Reduce the cluster resource requirements need to run the CSI Sidecars
Motivation
Increased maintenance tasks on components
The SIG Storage community maintains CSI sidecars in separate repositories: external-attacher, external-provisioner, external-resizer and etc. The community must periodically update with go version bumps, library updates, CVE fixes, CHANGELOG updates and separate releases, which takes a lot of maintenance effort.
CSI Sidecars releases
The CSI Drivers/CSI Sidecars have an indirect dependency on the k8s version. This could happen because of:
- A new CSI feature that touches CSI Sidecars and k8s component - For example the ReadWriteOncePod feature needs changes in k8s components (kube-apiserver, the kube-scheduler, the kubelet), CSI Sidecars
Because of this indirect dependency the SIG Storage community creates a minor release of each CSI Sidecar for every k8s minor release. We use csi-hospath (a CSI Driver used for testing purposes) to test the compatibility of the new releases with the latest k8s version.
We follow the instructions on SIDECAR_RELEASE_PROCESS.md on every CSI Sidecar to create a minor release.
Maintenance tasks by CSI Driver authors and cluster administrators
CSI driver authors face a continuous maintenance burden. They must constantly track and update their drivers to align with the ever-evolving CSI sidecars, ensuring compatibility, security, and access to new features.

Resource utilization by the CSI Sidecar components
In Some CSI Driver control plane deployment setups each sidecar is configured with a minimum memory request, some examples of OSS CSI Driver deployments resource allocations:
- Memory request
- EBS CSI Driver
- In a CP node, sets a 40Mi memory request for each CSI Sidecars(5 sidecars), a total of 200Mi per node.
- In a worker node, sets a 40Mi memory request for each CSI Sidecar(2 sidecars), a total of 80Mi per node
- Azuredisk
- In a CP node, sets a 20Mi memory request for each CSI Sidecars(5 sidecars), a total of 100Mi per node
- In a worker node, sets a 20Mi memory request for each CSI Sidecars(2 sidecars), a total of 40Mi per node
- AlibabaCloud Disk
- In a CP node, sets a 16Mi memory request for each CSI Sidecars(average 4 sidecars) a total of 64Mi per node
- In a worker node, sets a 16Mi memory request for each CSI Sidecars(1 sidecars), a total of 40Mi per node The 5x memory request is additional overhead in the control plane nodes, 2x in the worker nodes
- EBS CSI Driver
Goals
To combine the source code of common Container Storage Interface (CSI) sidecars, controllers, and webhooks into a single monorepo.
From the single repository, produce a single artifact(binary and container image) similar to how kube-controller-manager operates.
- If we just merge the source code, we won’t be able to reuse resources and realize the above advantages
- To minimize the impact on CSI driver authors and cluster administrators, the migration process is unified into a single step, avoiding separate code and binary migrations. CSI driver authors and cluster administrators can keep building binaries and images with individual sidecars from the single repository. Each CSI driver author can start using the merged sidecar binary
The sidecars includes the following:
Retain git history logs of sidecars in new monorepo.
Non-Goals
- Include sig-storage-lib-external-provisioner
in the new repository.
- Because it doesn’t depend on release-tools or csi-lib-utils.
Proposal
Overview
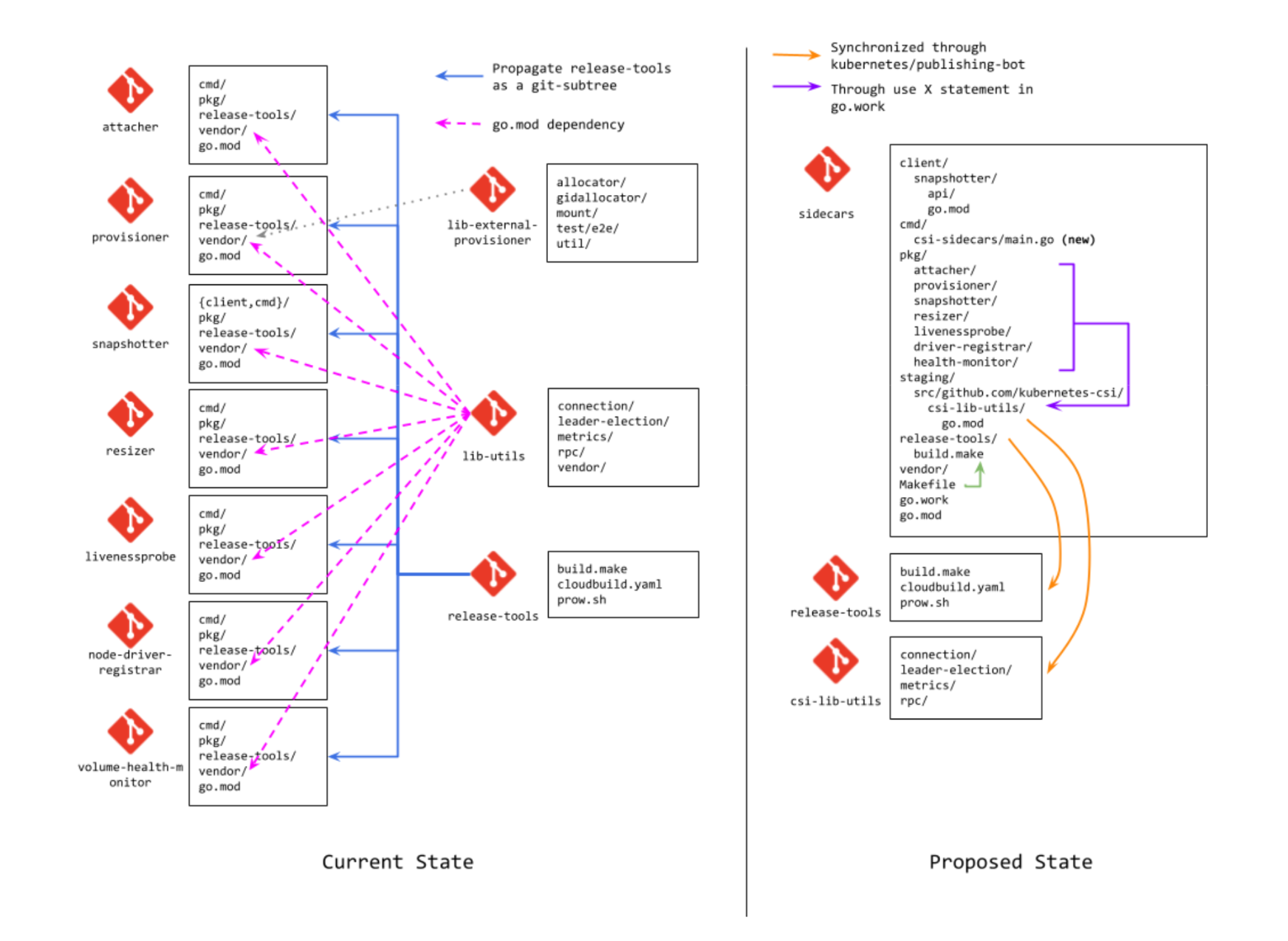
The proposal consists of creating a monorepo which creates a single artifact with common sidecars combined in one binary:
- Combine the source code of all common CSI sidecars (external-attacher, external-provisioner, external-resizer, external-snapshotter, livenessprobe, node-driver-registrar), Controllers(snapshot controller, volume-health-monitor controller), Webhooks(csi-snapshot-validation-webhook) in a single repository. A total of 7 repositories including 6 sidecars, 2 controllers and 1 webhook.
- Include the source code of helper utilities in the same repository(csi-release-tools , csi-lib-utils ), sidecars/apps use the local modules through go workspaces. A total of 1 release helper and 1 go module.
- Create a new cmd/ entrypoint that enables sidecars selectively, similar to kube-controller-manager and the –controllers flag.
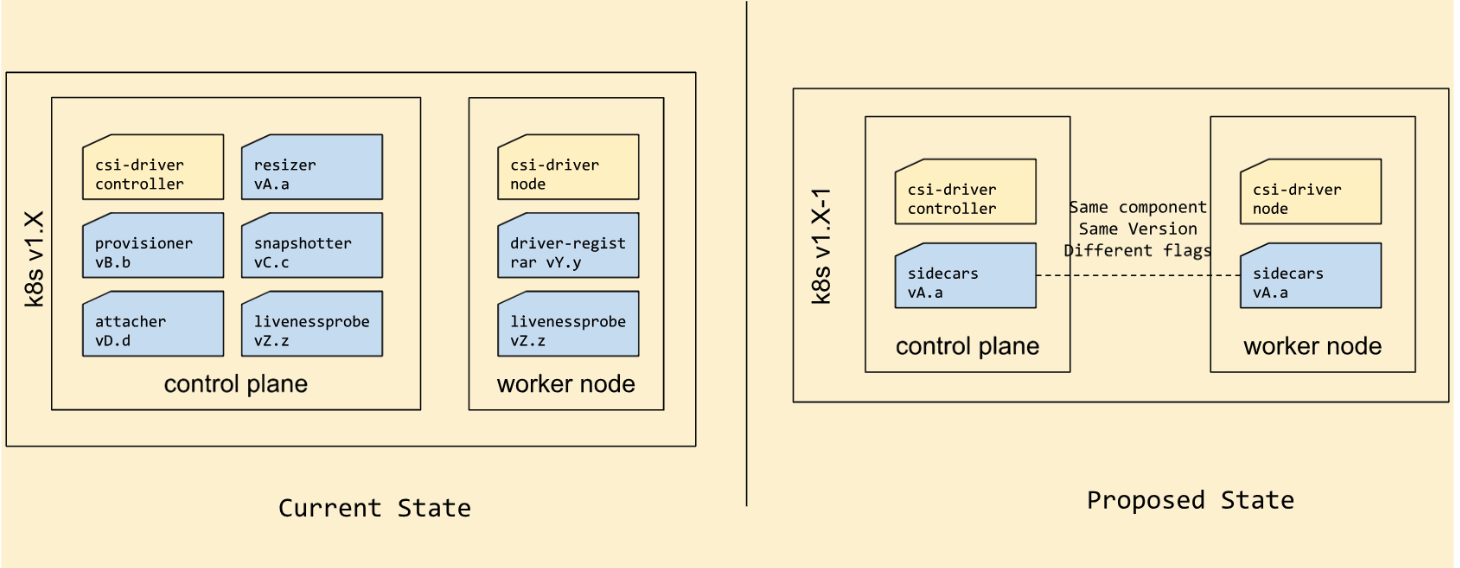
CSI Driver authors would include a single sidecar in their deployments(in both the control plane and node pools). while the artifact version is the same, the command/arguments will be different.
pictures:
The CSI Driver deployment manifest would look like this in the control plane:
kind: Deployment
apiVersion: app/v1
metadata:
name: csi-driver-deployment
spec:
replicas: 1
templates:
spec:
containers:
- name: csi-driver
args:
- "--v=5"
- "--endpoint=unix:/csi/csi.sock"
- name: csi-sidecars
command:
- csi-sidecars
- "--csi-address=unix:/csi/csi.sock"
# similar style as kube-controller-manager
- "--controllers=attacher,provisioner,resizer,snapshotter"
- "--feature-gates=Topology=true"
# leader election flags for all the components as one
- "--leader-election"
- "--leader-election-namespace=kube-system"
# global timeouts
- "--timeout=30s"
# per controller specific flags are prefixed with the component name
- "--attacher-timeout=30s"
- "--attacher-worker-thread=100"
- "--provisioner-timeout=30s"
volumeMounts:
- mountPath: /csi
name: socket-dir
The CSI Driver deployment manifest would look like this in the worker node
kind: DaemonSet
apiVersion: apps/v1
metadata:
name: csi-driver-deployment
spec:
template:
spec:
containers:
- name: csi-driver
args:
- "--v=5"
- "--endpoint=unix:/csi/csi.sock"
- name: csi-sidecars
command:
- csi-sidecars
- "--csi-address=unix:/csi/csi.sock"
# similar style as kube-controller-manager
- "--controllers=node-driver-registrar"
- "--kubelet-registration-path=/var/lib/kubelet/plugins/<csi-driver>/csi.sock"
volumeMounts:
- name: registration-dir
mountPath: /registration
- name: plugin-dir
mountPath: /csi
volumes:
- name: registration-dir
hostPath:
path: /var/lib/kubelet/plugins_registry/
type: Directory
- name: plugin-dir
hostPath:
path: /var/lib/kubelet/plugins/<csi-driver>/
type: DirectoryOrCreate
Quantifiable characteristics of the current state and of the proposed state
| Characteristics/State | Current state of CSI Sidecars(let nr. of csi-sidecars=6) | CSI Sidecars in signal component |
|---|---|---|
| Human effort of propagating csi-release-tools | (nr. of csi-release-tools changes * nr. of csi-sidecars) | 0, (because csi-release-tools is part of the repo) |
| Human effort of propagating csi-lib-utils | (nr. of csi-lib-utils changes * nr. of csi-sidecars) | 0, (because csi-lib-utils is part of the repo) |
| go mod dependency bumps | (nr. of dependency changes * nr. of csi-sidecars) * CSI releases supported(unknown) | nr. of dependency changes * releases supported(follow k8s release) |
| runtime update | (nr. of csi-release-tools changes related with go runtime updates * nr. of csi-sidecars) | nr. of go runtime updates |
| members of CSI releases per k8s minor release | nr. of csi-sidecars | 1 |
Additional properties of a single CSI Sidecar component without a quantifiable benefit:
| Dimension | Pros | Cons |
|---|---|---|
| Releases | ||
| Testability | ||
| Performance & Reliability |
| |
| Simplicity |
|
|
| Integration with CSI Drivers |
|
User Stories (Optional)
Notes/Constraints/Caveats (Optional)
Design Details
Glossary
- Individual repository: An existing repository in the kubernetes-csi/ org in Github e.g. the external-attacher repository.
- AIO monorepo(monorepo): The monolithic repository where most of the code of the CSI Sidecars will be migrated.
- Monorepo component: The source code of an individual repository that is currently being migrated or already migrated to the monorepo.
- AIO Sidecar Image: The All-In-One sidecar image utilizes a monorepo
- repository root path: The portion of a module path that corresponds to a version control repository’s root directory.
AIO Monorepo
Release Management
Use Semantic Versioning in monorepo.
RBAC policy
We designed the AIO monorepo’s RBAC policy to mirror that of individual repos, where each controller maintains its own policy. Driver maintainers should apply proper RBAC when enabling specific controllers in AIO more discuss info in here
We plan to combine informer caches of different controllers in the future
Command Line
Divided the command lines into two types, a generic command line whose configuration is common to all controllers and is configured only once, and the other type of command lines whose configuration is different for each controller. these command lines each has a new unique name. prefix with the controller name.
- name: csi-sidecars
command:
- csi-sidecars
- "--csi-address=unix:/csi/csi.sock"
# similar style as kube-controller-manager
- "--controllers=attacher,provisioner,resizer,snapshotter"
- "--feature-gates=Topology=true"
# leader election flags for all the components as one
- "--leader-election"
- "--leader-election-namespace=kube-system"
# global timeouts
- "--timeout=30s"
# per controller specific flags are prefixed with the component name
- "--attacher-timeout=30s"
- "--attacher-worker-thread=100"
- "--provisioner-timeout=30s"
example PR: https://github.com/kubernetes-csi/external-attacher/pull/620
Code synchronization
During the transition phase (before individual repositories are fully deprecated), code changes (especially bug fixes and CVE patches) need to be synchronized from individual repositories into the AIO MonoRepo.
This process will be automated using shell scripts . This sync script will potentially performing necessary adjustments (like import path updates if needed by the dependency strategy).
Individual repo history
The Git history from each individual repository must be preserved during the consolidation into the AIO MonoRepo.
This is critical for traceability. It allows developers investigating bugs or changes in the MonoRepo to easily track the origin of the code back to its specific commit in the individual repository’s history using standard Git tooling (git blame, git log).
This will likely be achieved using Git strategies designed for repository merging, such as careful merge commits, git graft, or potentially git replace during the initial import phase, ensuring commit hashes remain discoverable. Tooling will be developed to aid this process.
Reproducible builds & Dependencies Management
To keep reproducible builds of a Monorepo, when syncing codes from individual repositories, it is critical to enforce consistent dependency versions across all MonoRepo component. Avoiding discrepancies that could break builds or introduce compatibility issues.
To simplify dependency management, including ensuring reproducible builds, we will adopt a single go.mod and go.work file at the root directory. Nested, imported repositories will not have their own go.mod files.
Future Sidecar Integration
Eligibility: Any sidecar that achieves General Availability (GA) is eligible for integration into the AIO monorepo. Process: We will provide clear documentation outlining the steps for integration. While only GA projects are eligible for final integration, we encourage owners of pre-GA sidecars to follow these instructions as well. This will ensure your project is properly prepared for a smooth integration once it reaches GA status. Ownership: The original developers will retain full ownership and control of their sidecar project.
Risks And Mitigations
Breaking Changes Amplification: Breaking changes in one component forces the single release to be a breaking change
Vulnerability Blast Radius: Vulnerability that might affects one component affects all other components
This risk is considered acceptable. An analysis showed that most recent vulnerabilities were in shared dependencies (like parsers or metric libraries) that affected all sidecars anyway. The benefit of simplified patching outweighs this risk.
Full discussion in: https://docs.google.com/document/d/1SD4YRas_qXMP363L4j3WBTV_F9anq-5FM5gdGmJq7h0/edit?usp=sharing
Panic Propagation: Panic in one component restarts the sidecar
For each sidecar define where in the stack a panic should be caught to possibly restart the controller.
List of fixed issues related with panics:
- https://github.com/kubernetes-csi/external-provisioner/issues/839
- https://github.com/kubernetes-csi/external-provisioner/issues/582
- https://github.com/kubernetes-csi/external-attacher/issues/502
panic like OOM doesn’t count into this type(perhaps no good way to reduce the blast radius)
Synchronization Complexity: Maintaining code consistency between the AIO MonoRepo and the individual repositories during the transition period (before full deprecation) requires careful management.
Development workflow
MileStone

workflow1:
Milestone-modify-entrypoints-of-existing-sidecars-to-integrate-it-seamlessly-with-the-AIO-sidecar
Objective: Refactor the CSI Sidecar entrypoint (e.g. cmd/external-attacher/main.go) so that it also exposes a public function that can be reused from both the existing cmd/external-attacher/main.go and from the AIO Sidecar main.
Tasks:
- For {external-attacher, external-provisioner, …} split the main function
- For {external-attacher, external-provisioner, …} add per sidecar specific flags
- Introduce the concept of global flags in the AIO sidecar
workflow2:
Milestone-setting-up-a-Kubernetes-CSI-Storage-Repository-with-nested-directory-synchronization
Objective: Create a new repository and mirror the nested directories of the existing sidecars to the new repository.
Tasks:
- Create
kubernetes-csi/csi-sidecarsrepository - Mirror the nested directories of the all the seven sidecars repo to the new repository.
- Add a README.md to the new repository.
Milestone-Build-the-project-using-a-modified-copy-of-release-tools
Objective: Use the release tools to build the project into AIO Sidecar images
Tasks:
- Add new release logic of the release tools to support the AIO monorepo and individual repos at same time
- Build the project into AIO Sidecar image with the release tools
Milestone-set-up-new-test-infra-jobs-to-test-the-project-through-the-hostpath-CSI-Driver
Objective: Ensure the AIO MonoRepo is testable using existing e2e tests and new CI infrastructure.
Tasks:
- Modified the test infra jobs to support the new repository
- Validate prow jobs against new repo
- Set up github actions to trigger tests for every new PR, including all the e2e test of individual repo
Milestone-ready-to-accept-PR-from-community
Objective: Once individual repositories enter the FeatureFreeze state, the monorepo will be open to accept PRs from contributors of those repositories.
Tasks:
- Setup github actions(unit, golangci, etc) in new monorepo
- create CONTRIBUTING.md guidelines specific to the MonoRepo.
workflow3
Milestone-define-the-path-for-2-CSI-Drivers-to-be-migrated.
Objective: Develop detailed migration steps/examples for at least two representative CSI drivers.
Milestone: Have instructions for CSI Driver authors
Objective: Inform and guide CSI driver maintainers on how to adopt the new AIO sidecar model.
Tasks:
- Socialize the KEP, document the migration process clearly.
Milestone-three-cloud-vendors-start-using-the-monorepo-component-for-multi-k8s-minor-releases
Objective: 3 CSI Drivers using the AIO sidecar for 3 consecutive k8s minor releases.
Task:
- utilizing the provided migration instructions.
- Identify and support 3 cloud vendors using the AIO sidecar image in production across 3 consecutive Kubernetes minor releases
Milestone-accept-PR-from-community
Objective: Transition development fully to the MonoRepo as individual repositories freeze.
Tasks:
- Mark external-provisioner as featurefreeze state
- Accept external-provisioner Monorepo component’s PRs
- Mark external-attacher as featurefreeze state
- Accept external-attacher Monorepo component’s PRs
- ….
workflow4
milestone-all-individual-repo-has-been-into-featurefreeze-state
objective: Systematically stop new feature development in individual repositories.
task:
- Announce FeatureFreeze dates per individual repo
- coordinate with maintainers to stop merging feature PRs of individual repo
- merge pending PRs to the specific individual repo
- Formally mark individual repo as feature-frozen.
- Repeat sequentially for all individual repos.
Milestone-all-individual-repo-has-been-into-deprecated-state
Objective: To gracefully deprecate individual repository while maintaining clear communication with its users and contributors, ensuring a smooth transition to monorepo.
Task:
- Write a deprecation notice to the specific individual repo
- Create a release in the individual repo and mark it as deprecated
- Notify key contributors, and users of the planned deprecation through mailing lists
- Assist Users in transitioning to monorepo through issues or slack.
- Repeat sequentially for all repos.
Milestone-merge-sidecar-informer-caches
Objective: To merge the sidecar informer caches, which will allow us to use cache more efficiently.
This is a nice improvement that shouldn’t be part of the MVP yet. It will happen after all of the CSI sidecars have been deprecated or migrated to the monorepo, and we will start it in another KEP
Questions and Answers
Project Goal and Motivation
Q: Will the snapshot-controller be part of the main AIO sidecar binary?
A: No. While the code for the snapshot-controller will be in the monorepo, it will be built as a separate binary and image. This is because it’s not a true sidecar and is not deployed with the CSI driver. Including it in the same binary was considered an anti-pattern.
Q: How will shared resources like leader election and Kubernetes API informers be handled?
A: The single binary will use a shared leader election mechanism and a shared informer for Kubernetes resources. This is a key benefit of the proposal, as it improves performance and reduces resource consumption.
Development and Release Process
Q: What is the strategy for developing new features?
A: After a “hard cut” date, all new feature development will take place exclusively in the monorepo. This approach avoids the complexity of trying to maintain features in parallel across both the new monorepo and the old individual repositories.
Test Plan
Prerequisite testing updates
Unit tests
Integration tests
e2e tests
Graduation Criteria
AIO MonoRepo state definition
- Design: The initial planning and definition phase (current state described in documentation).
- Alpha : Technical feasibility established. All seven sidecar repositories’ code has been integrated into the MonoRepo structure, and all original end-to-end (e2e) tests from the individual repositories pass successfully within the MonoRepo’s test infrastructure.
- Beta (production-verified): The MonoRepo is considered stable enough for early adoption by cloud vendors in production environments. Clear migration paths for CSI drivers are defined and documented.
- GA (released): The MonoRepo actively maintained, and accepts contributions (PRs) from the SIG Storage developer community. Development focus shifts from individual repositories to the MonoRepo components. Requires adoption and use in production by at least three cloud vendors.
- Standalone : Final state. The AIO MonoRepo is the source of truth. Code synchronization from individual repositories is no longer necessary as they are all deprecated.
Beta graduation would be at least 2 CSI Drivers using the AIO sidecar for at least 2 consecutive k8s minor releases. GA graduation would be at least 2 CSI Drivers using the AIO sidecar for 3 consecutive k8s minor releases.
Individual repository state definition
- Released: current state of individual repos
- FeatureFreeze:
- Any new feature PRs are not allowed to be filed to the master branch or release-X branches(Controlled by the individual repo maintainer, categorize it and reject it if it’s a feature)
- SIG Storage Developer file the feature PRs to AIO MonoRepo
- Except for the serious bugfixes or CVE fixes PRs (only from individual repo maintainer) which can be merged in master and backported to the other release-X branches
- Deprecated:
- Active maintenance stops.
- Eventually, building new images from this repository ceases (dependent on the full migration of all sidecars).
- (future) archive it but not at the same time as the deprecation time, this is a terminal state so we can’t undo it

Migration Process
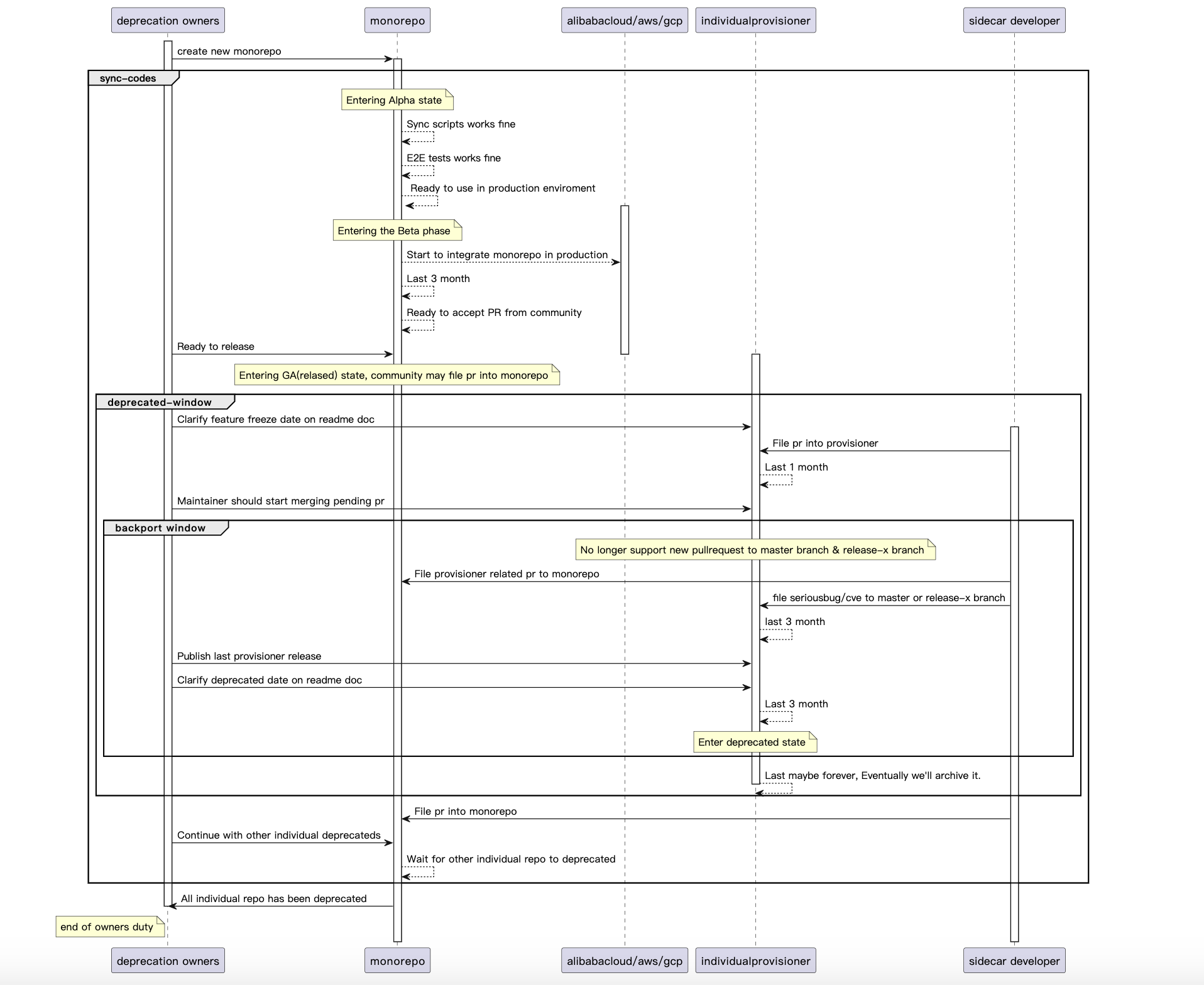
The migration follows a phased approach:
- Foundation & Setup: Create the new AIO MonoRepo, mirror the code (preserving history), adapt build/release tooling, and establish comprehensive test infrastructure (unit, integration, e2e, CI/GitHub Actions).
- Integration: Refactor the entry points (main.go) of individual repository to be callable functions, enabling them to run both standalone (for backward compatibility tests) and as part of the unified AIO binary, introducing global and component-specific flags.
- Adoption & Community Transition: Provide clear documentation and migration guidance for CSI driver authors. Engage with cloud vendors to test and adopt the AIO sidecar image in production (Beta -> GA trigger). Open the MonoRepo for community contributions as individual repositories enter FeatureFreeze.
- Individual Repository Phase-Out: Sequentially transition each individual repository into FeatureFreeze, followed by Deprecated status, communicating clearly with users and maintainers.
- Finalization: Once all individual repositories are deprecated, the AIO MonoRepo reaches the Standalone state.
Upgrade / Downgrade Strategy
The entire switchover is relatively simple, as it does not involve a gradual upgrade of the kubernetes controller plane components and data plane component, only the yaml and image of the csi components need to be upgraded, and the rollback is achieved directly through kubectl rollout.
Version Skew Strategy
Nothing in particular.
Production Readiness Review Questionnaire
Feature Enablement and Rollback
How can this feature be enabled / disabled in a live cluster?
It’s actually not a feature, but we can enable it by deploy new version of csidriver and disable it by delete the new version and redeploy the old version
Does enabling the feature change any default behavior?
This won’t make any changes to the default behavior of Kubernetes.
Can the feature be disabled once it has been enabled (i.e. can we roll back the enablement)?
It’s actually not a feature, it’s kind of architectural change. so user can deploy old version csi driver to disable it.
What happens if we reenable the feature if it was previously rolled back?
Nothing happened, it will act as usually
Are there any tests for feature enablement/disablement?
Yes. We will add unit tests with and without the feature gate enabled.
Rollout, Upgrade and Rollback Planning
How can a rollout or rollback fail? Can it impact already running workloads?
No, it will not impact already running workloads.
What specific metrics should inform a rollback?
Should be aware of pvc/pv and pod related persistent external storage failures event
Were upgrade and rollback tested? Was the upgrade->downgrade->upgrade path tested?
Is the rollout accompanied by any deprecations and/or removals of features, APIs, fields of API types, flags, etc.?
No, it does not.
Monitoring Requirements
How can an operator determine if the feature is in use by workloads?
Determine whether the csi-provisioner deployment includes a AIO Sidecar image by inspecting its container configuration.
How can someone using this feature know that it is working for their instance?
Only if their csi plugin are working correctly.
What are the reasonable SLOs (Service Level Objectives) for the enhancement?
What are the SLIs (Service Level Indicators) an operator can use to determine the health of the service?
The SLI for the CSI AIO project is based on individual sidecars’ SLIs, with metrics exposed by csi-lib-utils
- Metrics
- Metric name: operationsLatencyMetricName
- Components exposing the metric: Monorepo component
Are there any missing metrics that would be useful to have to improve observability of this feature?
Nothing in particular.
Dependencies
Does this feature depend on any specific services running in the cluster?
No.
Scalability
Will enabling / using this feature result in any new API calls?
No, It doesn’t increase the number of API calls. In fact, it will decreasing it
Will enabling / using this feature result in introducing new API types?
Nope
Will enabling / using this feature result in any new calls to the cloud provider?
Nope
Will enabling / using this feature result in increasing size or count of the existing API objects?
Nope
Will enabling / using this feature result in increasing time taken by any operations covered by existing SLIs/SLOs?
Nope
Will enabling / using this feature result in non-negligible increase of resource usage (CPU, RAM, disk, IO, …) in any components?
It will reduce disk and memory usage due to merging image and cache informer of csi driver
Can enabling / using this feature result in resource exhaustion of some node resources (PIDs, sockets, inodes, etc.)?
Nope
Troubleshooting
How does this feature react if the API server and/or etcd is unavailable?
What are other known failure modes?
What steps should be taken if SLOs are not being met to determine the problem?
Implementation History
Drawbacks
Alternatives
ReleaseManagement
We are consider to switch semantic version to k8s version, there are some pros and cons
pros:
- We don’t need to reinvent the wheel about what our dev process is going to look like, we follow the same docs as k8s https://kubernetes.io/releases/release/ . This is tried and tested for many releases
- Cluster administrators would know which version to use to match their CSI Driver deployment e.g. for a k8s 1.27 cluster they’d use the 1.27 release of the CSI Sidecar.
cons:
- Breaking changes might happen in a minor release, Cluster administrators MUST read sidecar release notes considering breaking changes before working on a big release.
- Version skew scenario becomes confusing for the cluster administrator e.g. they deploy the CSI Sidecars v1.x, cluster is upgraded to v1.{x+3} (CP upgrade first, NP later), nodepools would have CSI sidecar at v1.{x+3} with kubelet at v1.x
- k/k at 1.27.5 - CSI 1.27.0 or (different mapping still)
After investigation, we found that there isn’t clear advantage to switch to k8s versioning, so we are going to stick with the semantic versioning.
ReproducibleBuilds
- Using Go Workspaces (introduced in Go 1.18)
Using go work init and go work sync to manage multiple go.mod files within the MonoRepo.
- Single Root
Removing monorepo component level go.mod/go.sum files and managing all dependencies via a single go.mod/go.sum at the repository root path.
Conclusion: To simplify dependency management, including ensuring reproducible builds, we will adopt a single go.mod and go.work file at the root directory. Nested, imported repositories will not have their own go.mod files.